Учебно-исследовательский проект · ТПУ
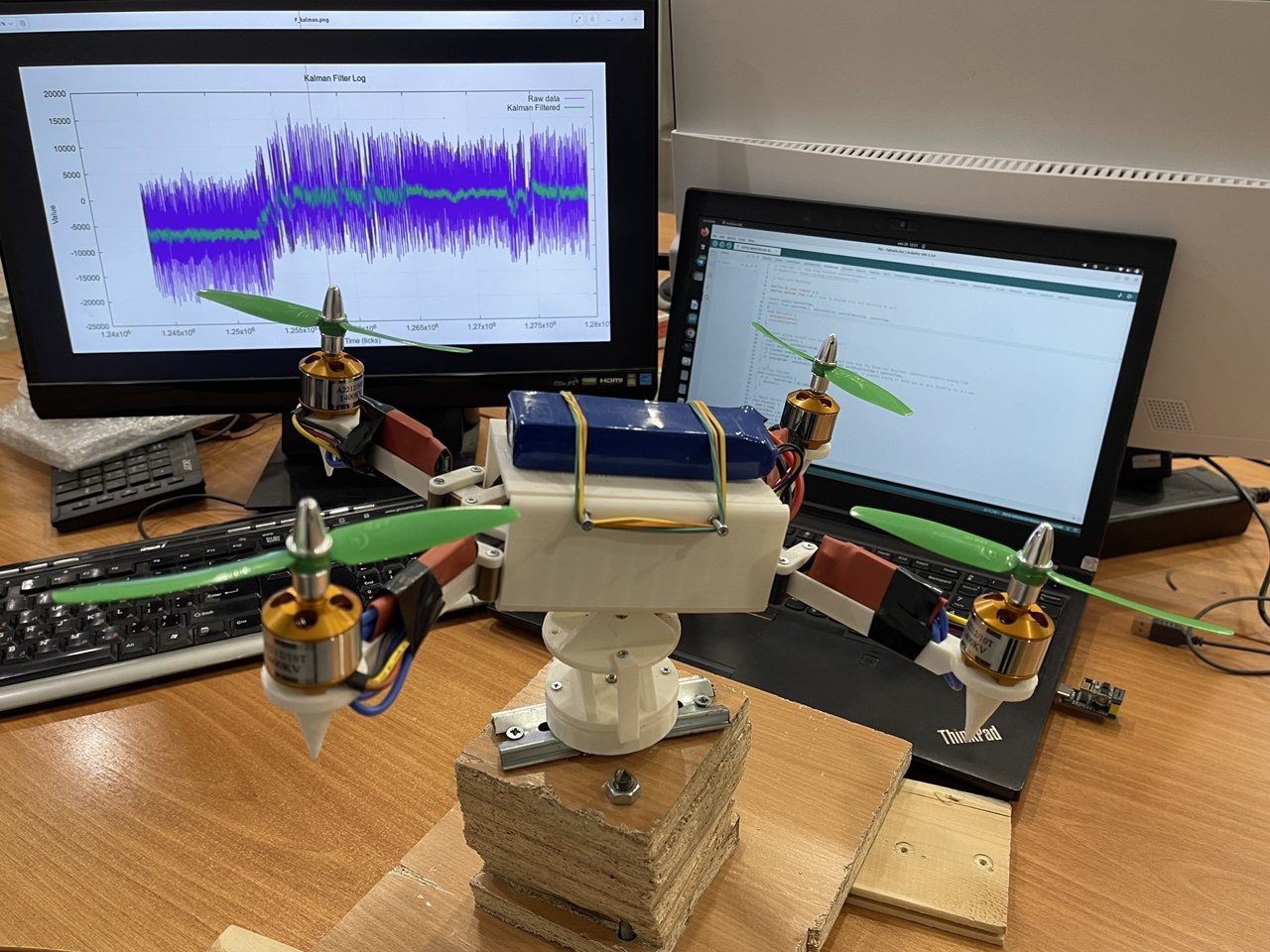
Экспериментальная платформа
Экспериментальная платформа
для управления квадрокоптером
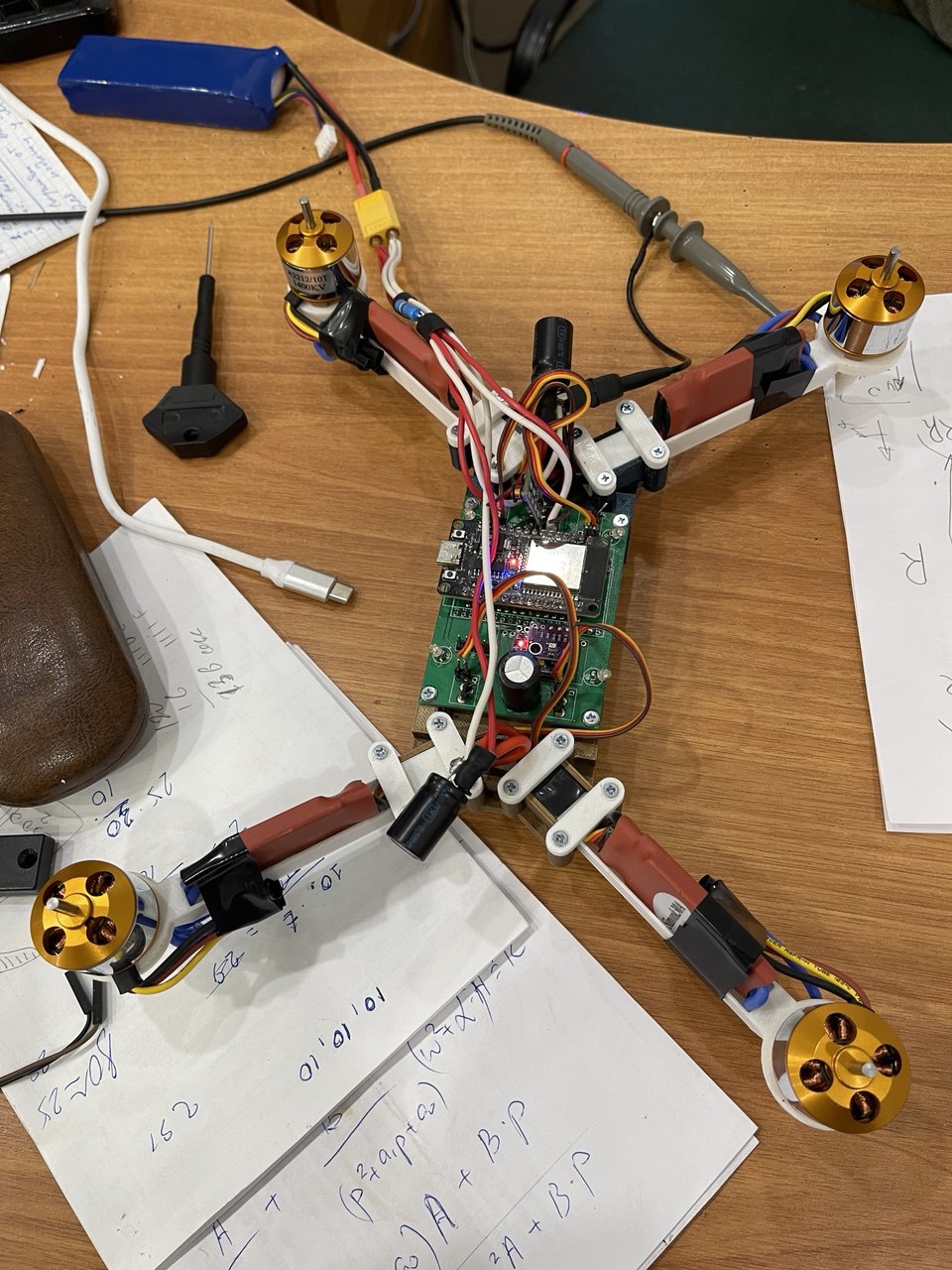
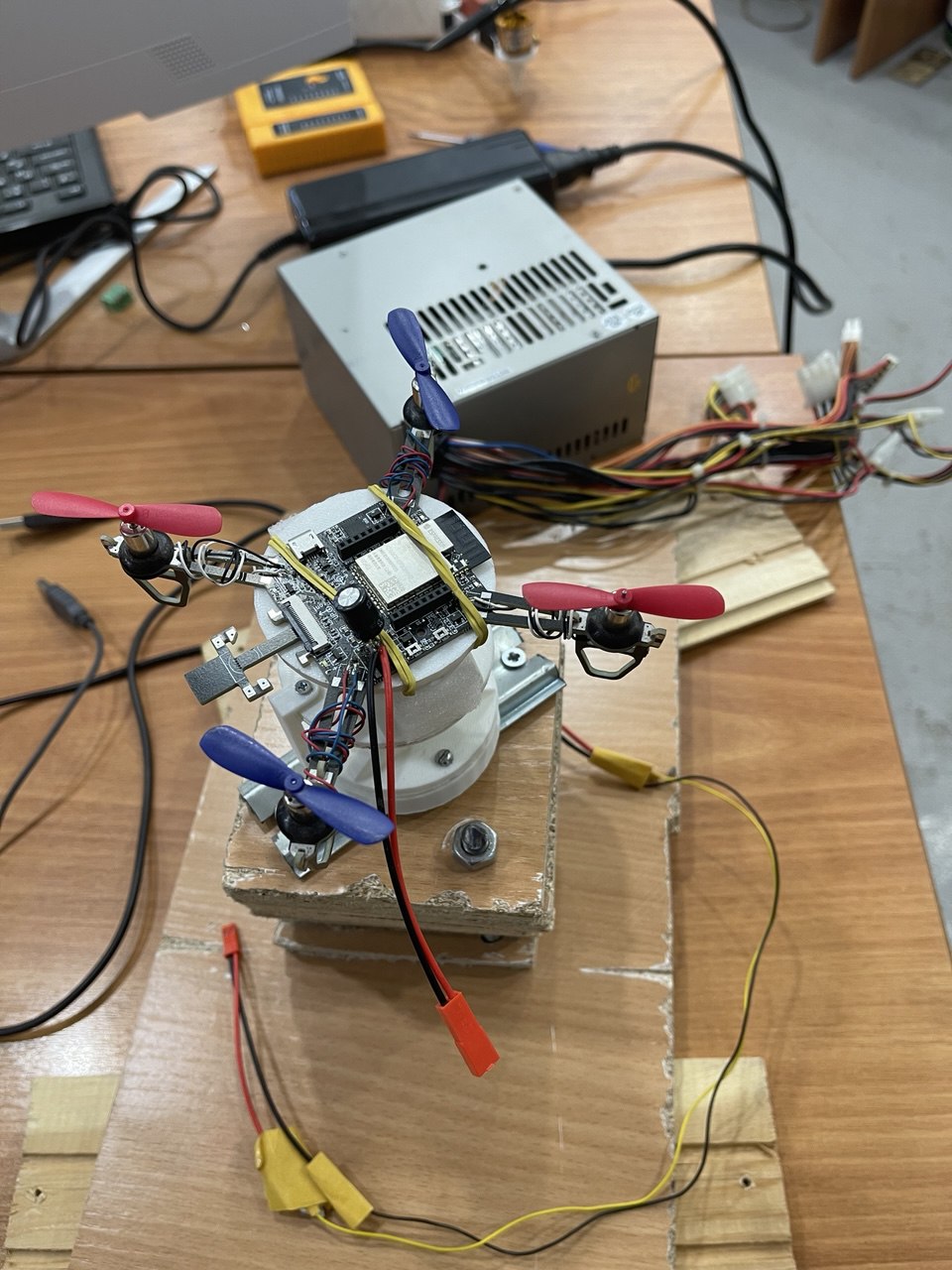
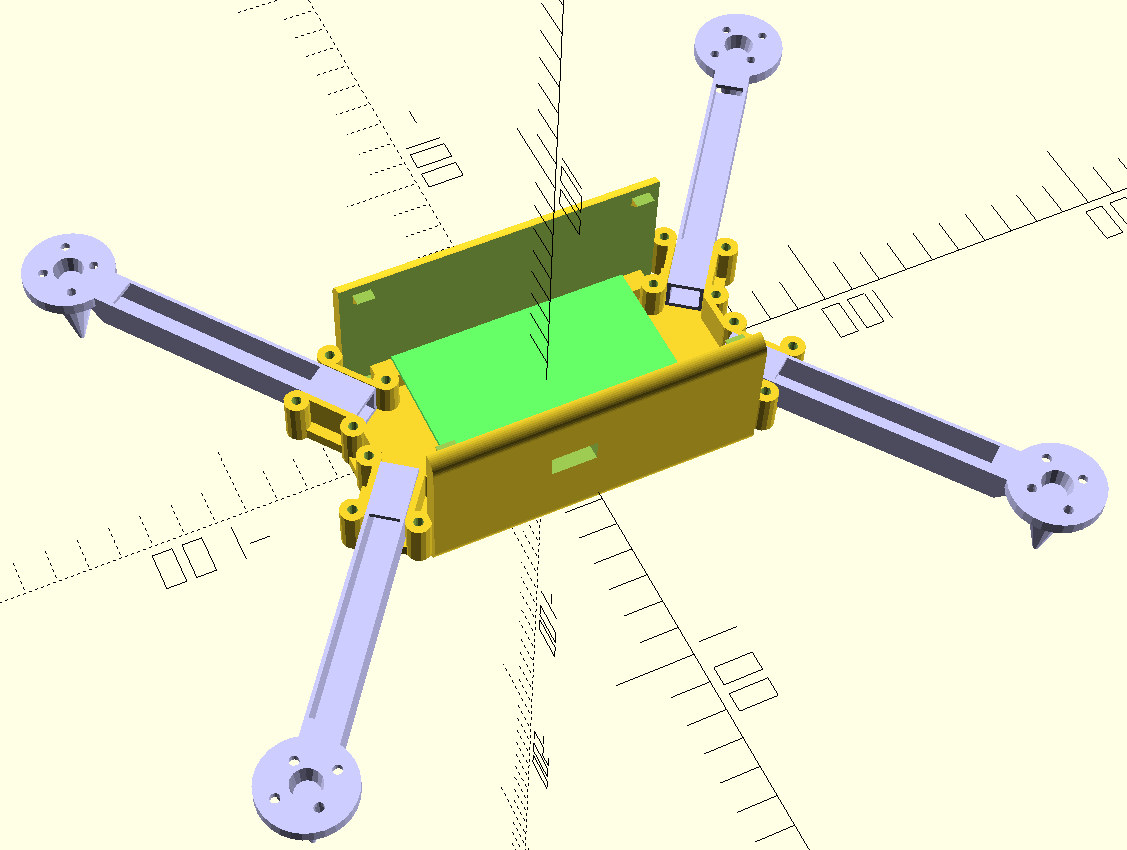
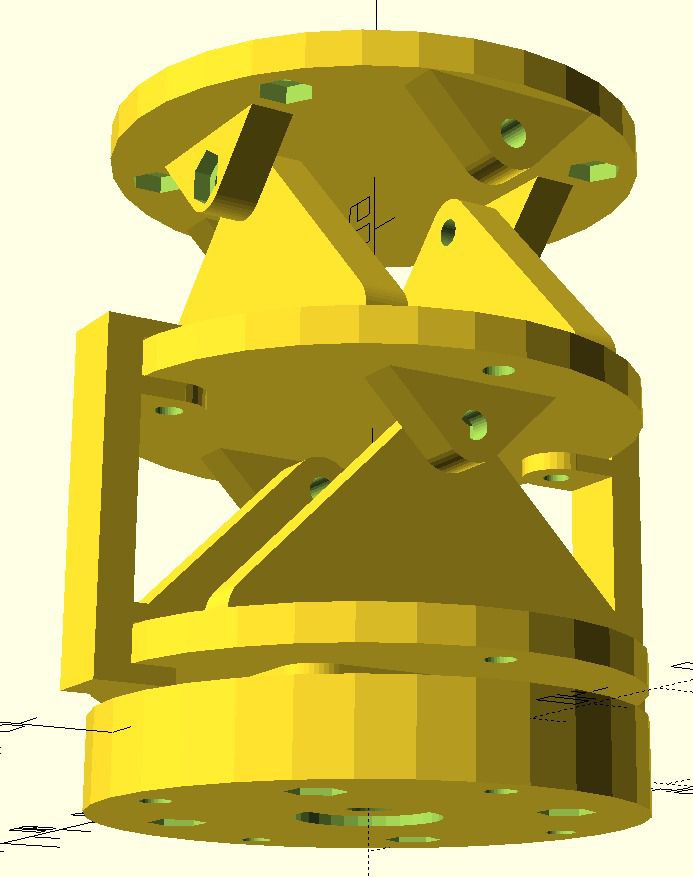
Открытая учебная платформа на базе ESP32: 3D-печать, реальные эксперименты и алгоритмы управления на трёхосевом механическом стенде.
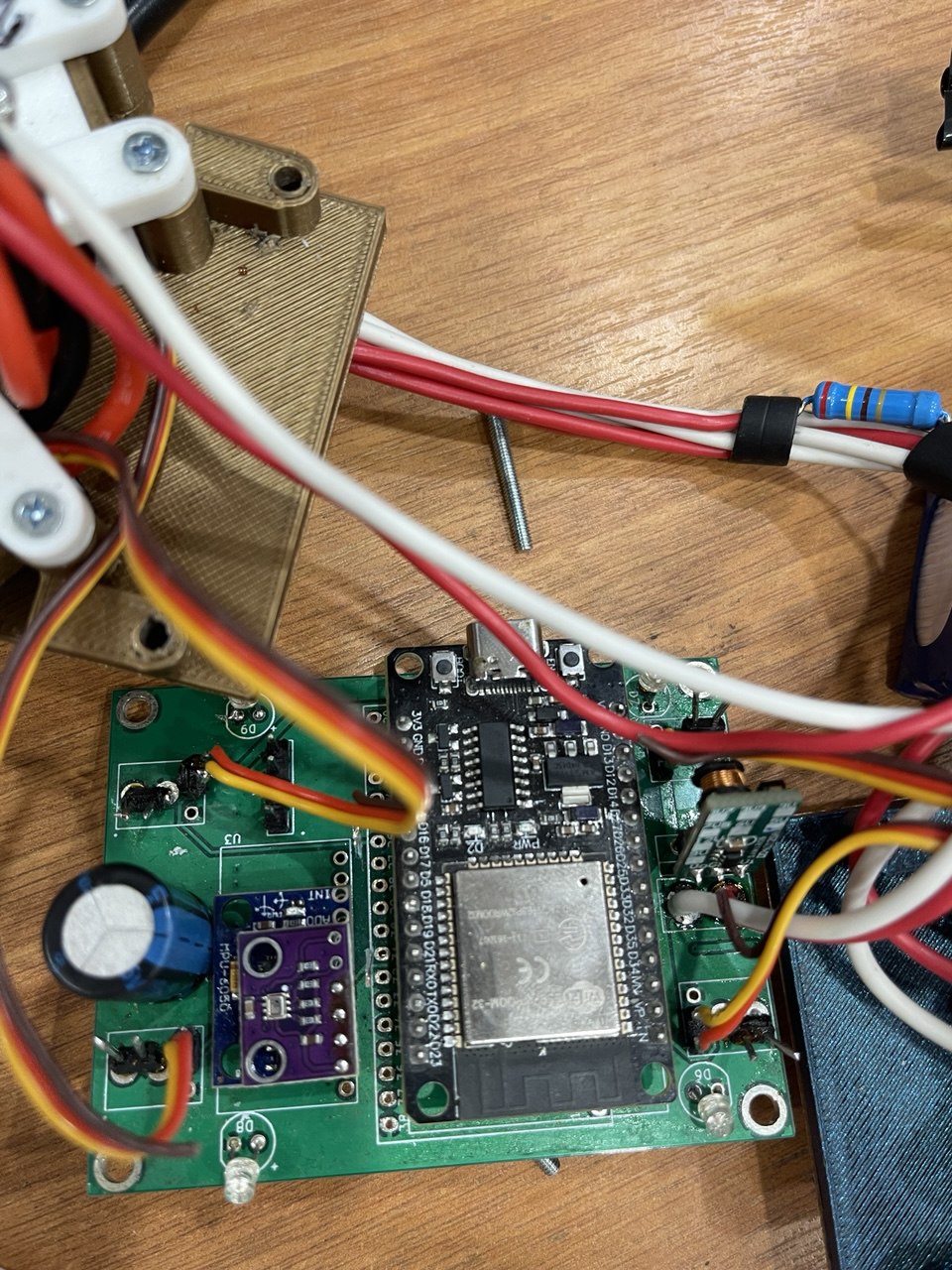
ESP-32
Контроллер
3D
Печатный корпус
3 оси
Механический стенд
MPU-6050
IMU датчик