Учебно-исследовательский проект
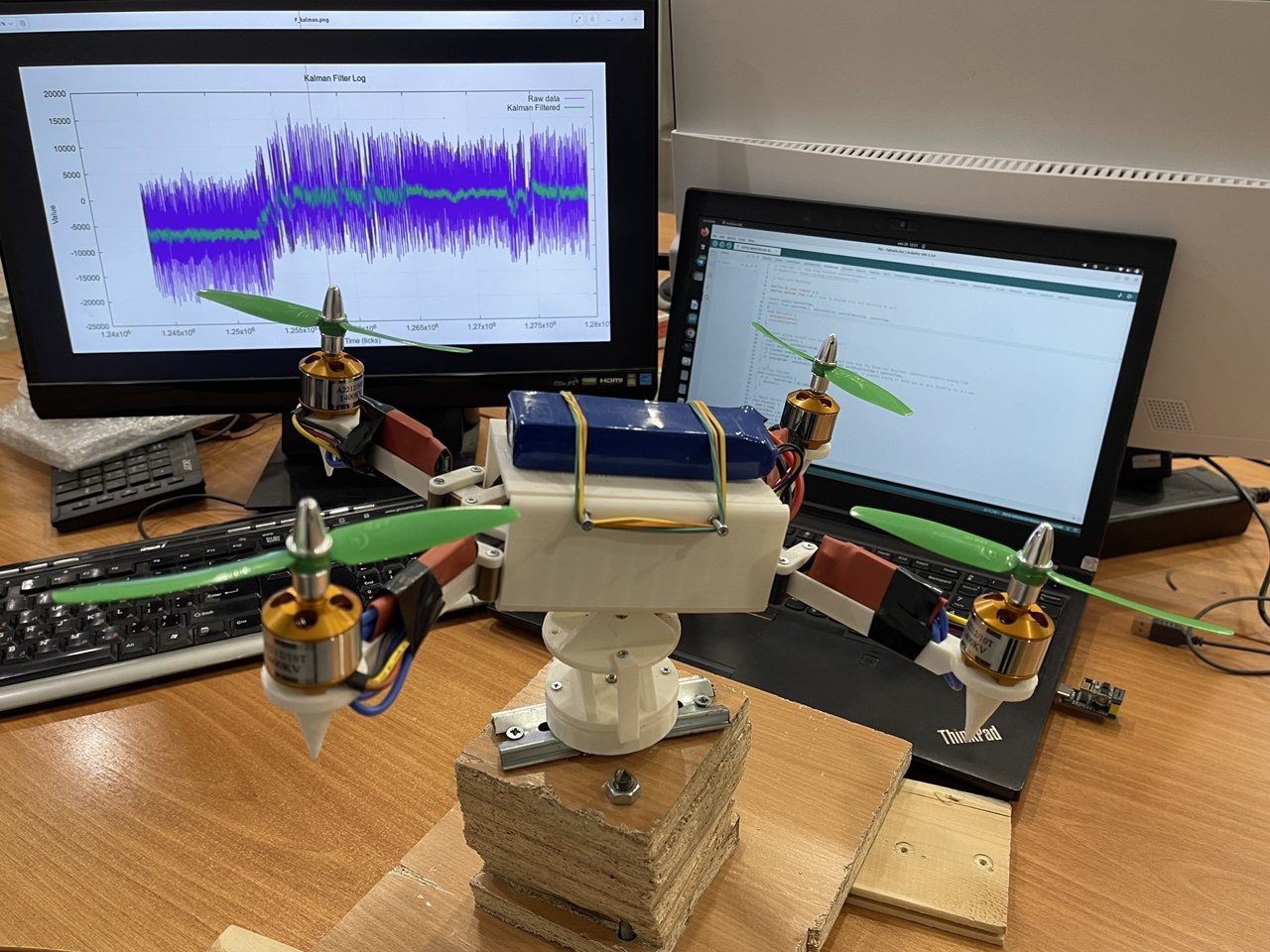
Экспериментальная платформа для исследования управления квадрокоптером
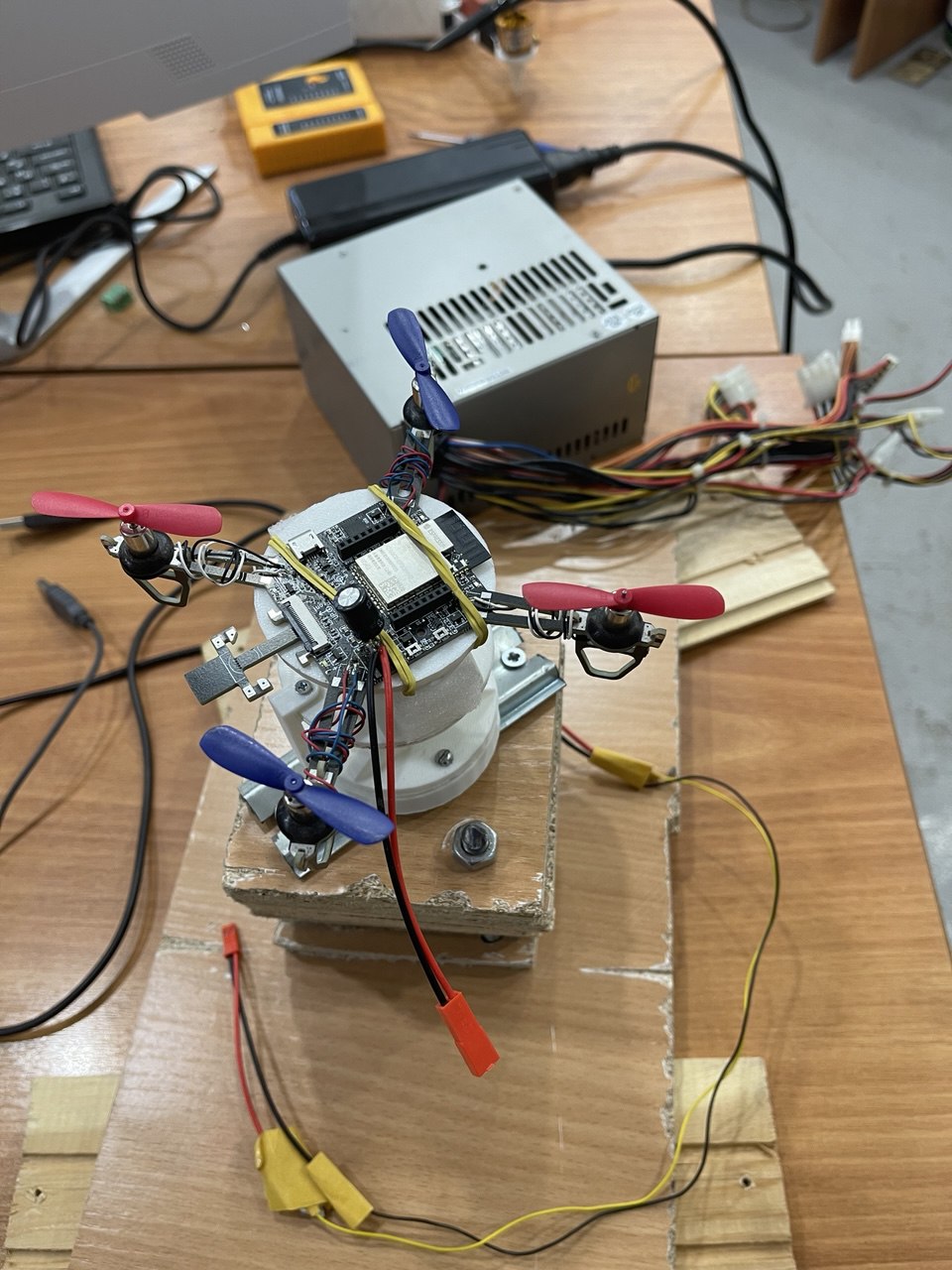
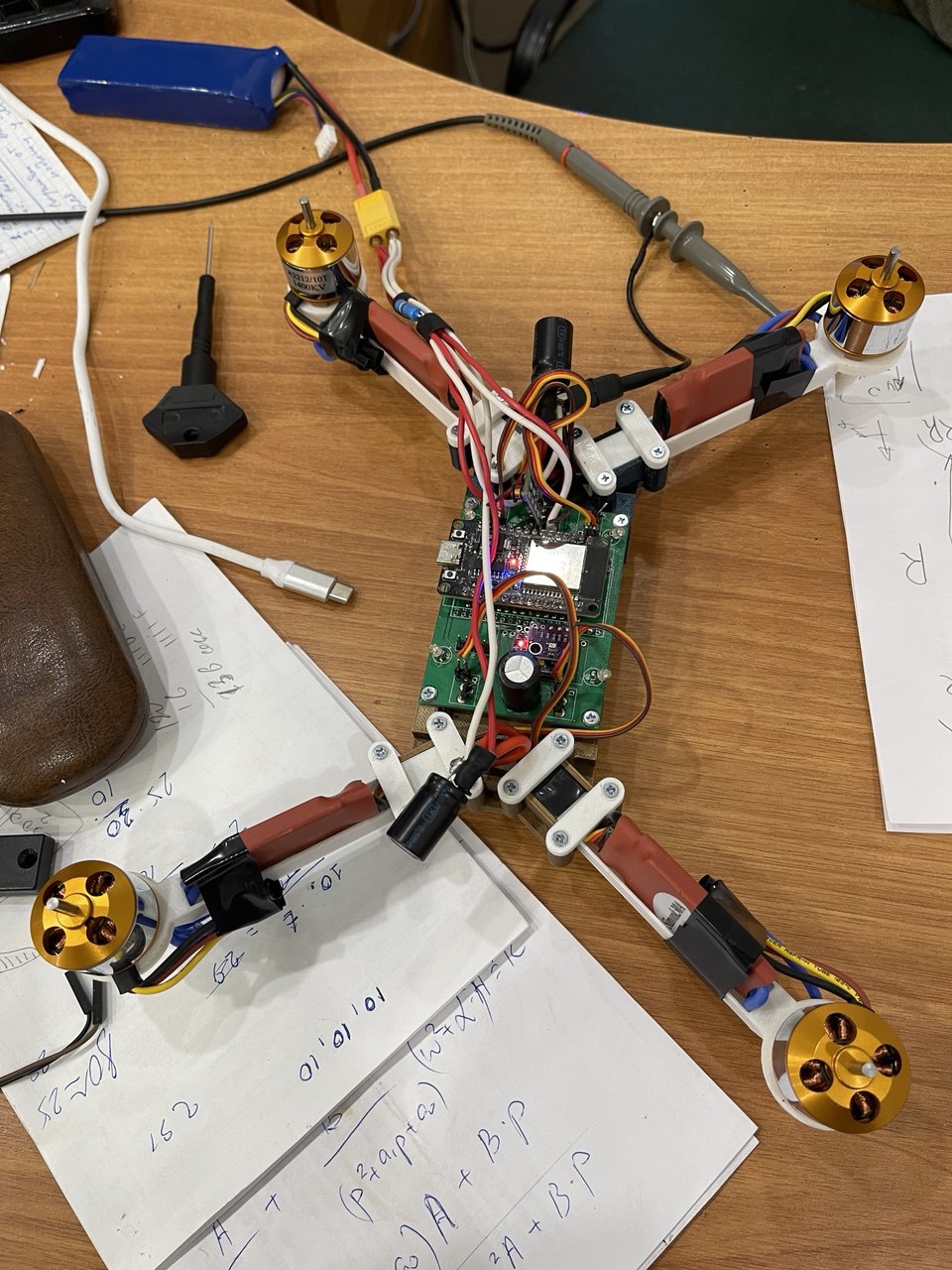
Квадрокоптер на базе контроллера ESP32, созданный как открытая платформа для обучения и экспериментов.
Основная цель проекта — создать учебную платформу, которая позволяет студентам:
- Освоить принципы построения систем управления сложными динамическими объектами;
- Научиться настраивать параметры регуляторов и оценивать влияние их изменений на поведение системы;
- Приобрести практический опыт проведения инженерных экспериментов и исследований;
- Развить интуицию и «чувствительность» к поведению систем, что особенно важно при изучении дисциплины «Теория автоматического управления» (ТАУ).
Проект объединяет теорию и практику, помогая будущим инженерам не только понять, как работает система управления, но и почему она ведёт себя именно таким образом.
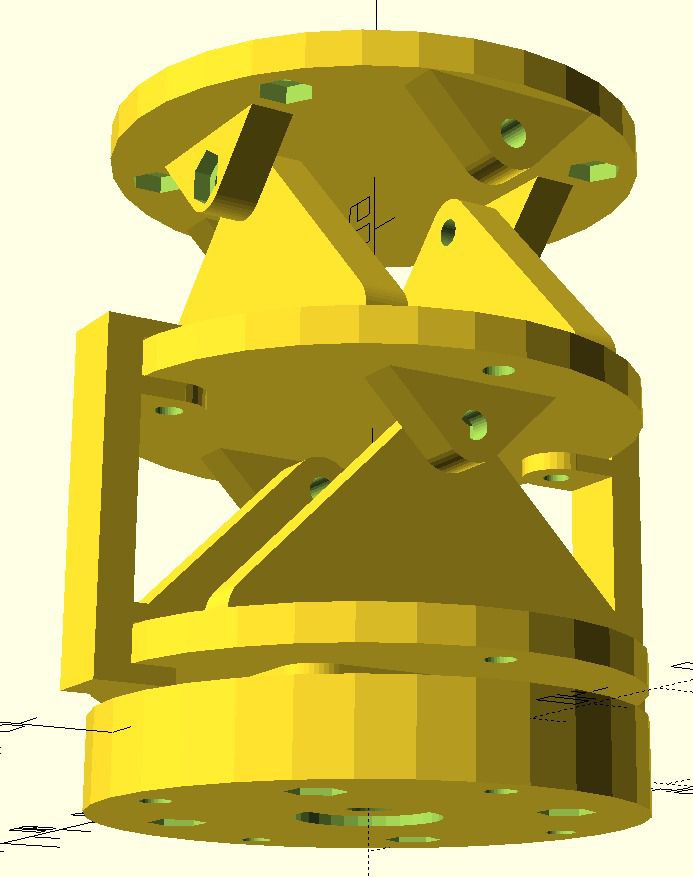
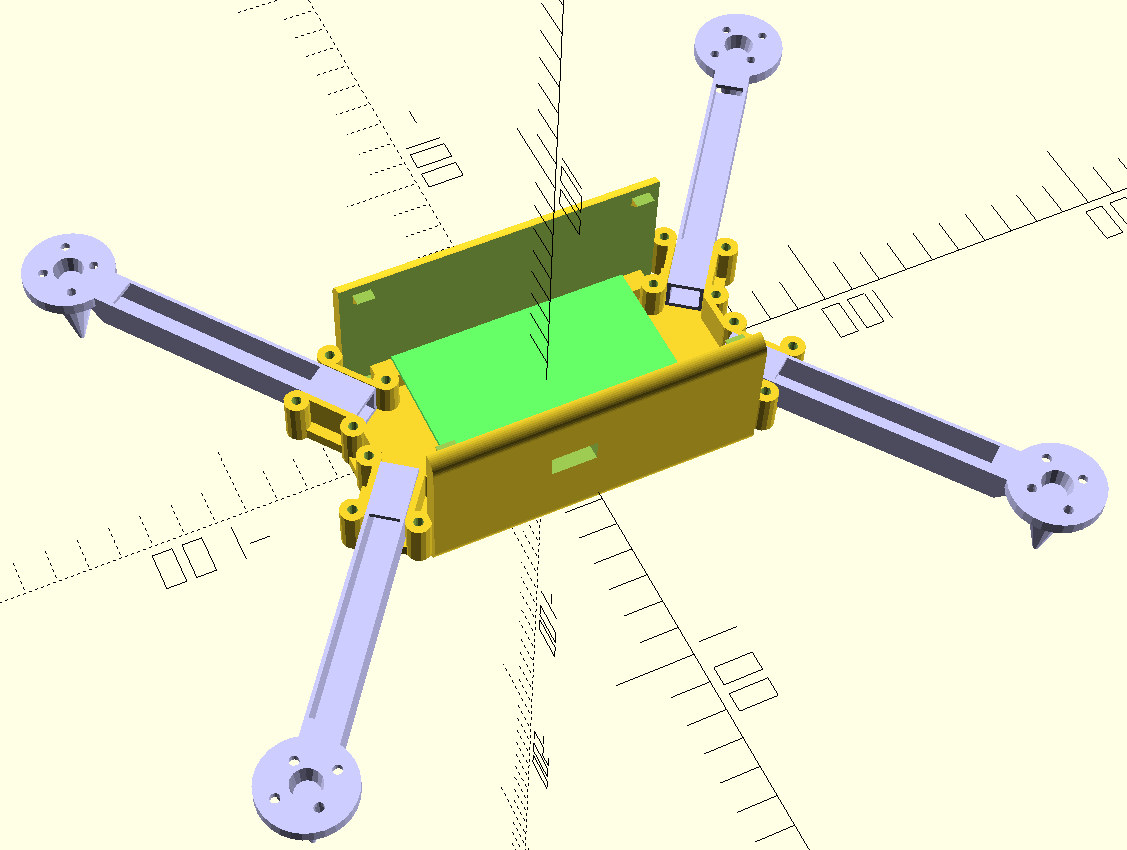
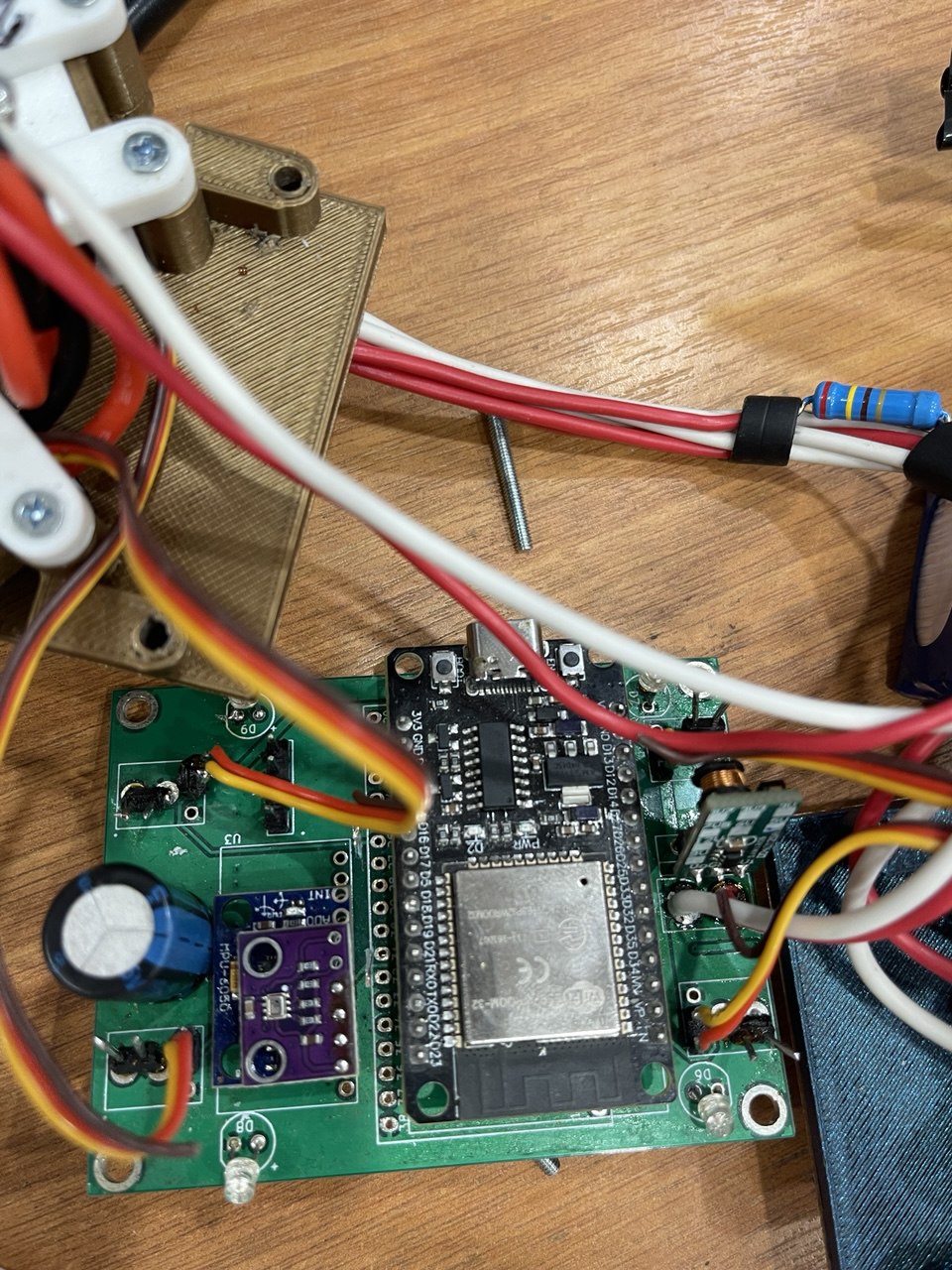
Конструкция опирается на детали, напечатанные на 3D-принтере, и микроконтроллер ESP-32, что делает стенд доступным, воспроизводимым и удобным для учебных и исследовательских задач.
3D-печать
корпус
ESP-8266
передача Wifi
MPU-6050
IMU
ESP-32
контроллер